
"At a soirée of the Royal Society conducted
by Hill in 1952 two subjects mounted a specially built tandem stationary bicycle.
While one subject pedaled the other subject resisted him through directly coupled
pedals. At a speed of 35 revolutions per minute, the subject pedaling forwards
used 3.7 times as much oxygen as the one pedaling backwards. It was demonstrated
that a small woman, pedaling backwards, could rapidly exhaust a large man pedaling
forwards against her resistance. Since oxygen consumption and heat production
are closely tied, the muscles of the woman were presumably generating far less
heat, even though the coupling of the pedals guarantees that the forces and
displacements experienced by the woman's feet were the same as those for the
man's." Thomas A. McMahon, from chapter 2 of Muscles,
Reflexes and Locomotion, Princeton Univ Press (1984).
Background:
The lecture notes tell you about Hill's equation for muscle
velocity-tension
![]()
with the figure below from McMahon's Muscles Reflexes and Locomotion
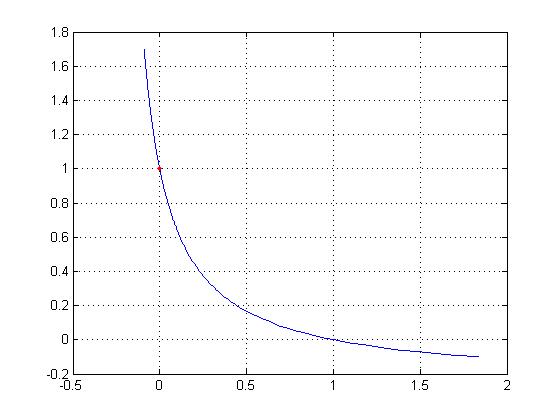
note the greater tension/fiber for negative velocity. The graph has been normalized
where we use  in the Matlab code described below, and you have control of constant k.
in the Matlab code described below, and you have control of constant k.
Note that α and β have the units of tension and velocity, respectively.
Muscle details:
1. Recruitment. To increase
tension (or velocity of contraction) muscle fibers are recruited, from the weakest
fibers (with the most endurance) up to the strongest fibers, which are most
easily fatigued. Yes is it true that individual fibers can be stimulated at
increasing rates by their motoneuron axons, up to tetanus tension, but to once
one fiber is pulling to the max, another fiber is recruited as necessary. In
the simulation below we have it that the "strong biker" has 100 fibers
involved in pedaling, with the maximum tension of the fibers from 1 to 100 force
units. In exercising the simulation (Tandem04.m) you choose the number of "weak
biker" fibers, an integer less than 100.
2. Velocity-dependent tension. Hill's equation shows the hyperbolic relationship
between muscle velocity and muscle tension. Note that when an active muscle is pulled
by an external load in the opposite direction of its intended contraction the muscle
is "doing a negative" (as weightlifters say) and its velocity is less
than zero. The tension per fiber is much greater in muscle fibers doing negatives
than tension in a fiber going the same speed in the opposite (positive) direction.
3. Muscle fatigue. The
FG (fast glycolytic) muscle fibers (white meat) that can exert the greatest maximum
tension are the most easily fatigued. In
Tandem04.m we model the fatigue as a first-order time constant that increases in
duration as the maximum tension per fiber decreases.
Requirements:
(1) On each of the computers in the lab, in the Work folder of Matlab, is
a folder Tandem that has a read-only file Tandem04.m function and
its subroutines TanFly04, FatigueCalc.m and recruit_fiber.m. The call
is
Tandem04(Wcnt, frce_thet, del_frce0, vmax, drg, fatigue_fac, k)
where the input arguments are
Wcnt the number of weak muscle fibers;
frce_thet the threshold force (torque) the strong biker must meet
in the recruitment function;
del_frce0 the approx difference between strong and weak muscle
torque used by the ODE solver;
vmax the zero-force velocity derived from Hill's equation: 
drg the drag term from the model for the bicycle load;
fatigue_fac: increases time constant of fatigue onset:
if less than 1.00 (but greater than 0) it means the rate of fatigue is increased;
k the term noted above, from Hill's formula for normalizing velocity
or tension.
Tandem04.m
is linked to colored notations for its various sections.
If you open Matlab and type at
the command window
>> Tandem04(94, 2400, 90, 900, 14, 1.00, 0.2)
you will be asking for 94 weak fibers, with a pedal tension of 2400 units, a strong-weak
force difference of 90 units, a vmax of 900 velocity units, a mechanical drag or
friction of 14 units, a fatigue factor of 1.00 and constant k = 0.2 for Hill's equation
normalization. When you run Tandem04.m with those conditions you will see that the
strong muscle fatigues in 35 seconds, and a final fiber number vs tension plot looks
like:

Your challenge: by adjusting the simulation parameters available to you (except for pedal tension), arrange that the "strong" biker fatigues at (say) 45 seconds.
(2) Pedal vs Resist on the
tandem bike.
Inspect the stationary
tandem bike. Note that the gear ratios for the two sets of chains connecting pedals
to the rear flywheel are the same. Notice the mechanisms for tightening the chains.
The two lab partners will sit on the bike seats facing each other, the longer-legged
partner on the seat near the loose handlebars. You need to balance without holding
onto anything with your hands. Place your hands palms down on the tops of your quads.
Who is stronger? Put your feet
on the pedals and rotate until the pedals are in mirror image positions, where the
top pedal for each rider is in a position to be pressed down with force. The "coxswain"
will say "push!" and watch to see which way the chain moves, with both
bikers temporarily exerting to the max. Whoever moves the chain in the positive
direction will be "stronger". If the chain doesn't move at all it is arbitrary
who will be "strong".

Next, the coxswain will
look at his watch and say "start". The weak biker will let the strong
biker pedal forward, while resisting, in cadence with the call of the coxswain,
who will look for approx 0.5 Hz rotation of the pedals. The strong biker will be
doing torque X radians of rotation amount of work, while the weak biker will be
"absorbing" or resisting with the same amount of energy use. The coxswain
can call out 15 second intervals. After a predetermined amount of time (between
1 and 5 minutes) the coxswain will say "Weak biker exert!" At that moment
the weak biker will pedal has hard as he/she can, and we will see if the pedal rotation
reverses, and to what speed in rad/sec.
After an interval of rest, try again, with a different duration of pedaling.
Notes:
The Machine shop modified a 50 year-old Schwinn tandem bicycle formerly owned by
Profs Blume and Bower. The seat heights are a little difficult to adjust, and the
chains sometimes slips off if pedaling is too fast (> 90 RPM).
The day after "the contest" the subject who resisted with negatives may feel sore leg muscles: Only by doing negatives can you increase muscle mass, as weightlifters know.
(3)
We have not yet outfitted the tandem
bike with instrumentation. Help design on paper instrumentation for the Tandem
bike and riders. Answer the following questions as best you can. Place your
answers in a Word file in your IP folder. The Word file may contain links to
websites where a particular type of instrumentation is discussed.
a. What sensor can report (in volts) the rotation speed (RPM) of the bike pedals?
Yes, you could monitor the rotation with a strobe light, but that would not
report directly a voltage.
b. What can sense the tension in the arms of the pedals during rotation?
And how could its response be relayed from the bicycle to a meter for
display?
c. How can the oxygen use of a subject on the tandem bike be sensed and reported?
Oxygen use would be a product of oxygen concentration (Inhale - Exhale) and
the "tidal volume" per breath. So say how to measure the volume of
a breath, and how to detect the concentration of oxygen in the exhaled air.
d. Say we want to monitor the temperature of the skin over the quadriceps muscle
while the bike is being pedaled. What sort of sensor could do that to a 0.05
deg C accuracy? Provide a website link to your answer.
e. How could nerve/muscle activity of the quad be monitored? (EMG: ref a 123
Lab) What type and size and placement of electrodes do you recommend?
Possible FTQ: Will the time for fatigue of the strong biker in the simulation increase, decrease or stay the same, given a change to a parameter selected by JD or TA?
More challenging FTQ: What (nonlinear first-order) differential equation can account for the hyperbolic form of the velocity-force curve? See reading below.
Reading: pages 11-16, 30-35, from T. A. McMahon, Muscles, Reflexes and Locomotion.
