Chapter 3
Analyzing motion of systems of particles
In this chapter, we shall
discuss
- The concept of a particle
- Position/velocity/acceleration relations for a
particle
- Newton’s laws of motion for a particle
- How to use Newton’s
laws to calculate the forces needed to make a particle move in a
particular way
- How to use Newton’s
laws to derive `equations of motion’ for a system of particles
- How to solve equations of motion for particles by
hand or using a computer.
The focus of this chapter is
on setting up and solving equations of motion we will not discuss in detail the behavior of
the various examples that are solved.
3.1 Equations of motion for a particle
We start with some basic
definitions and physical laws.
3.1.1 Definition of a particle
A `Particle’ is a point mass at some position in
space. It can move about, but has no characteristic orientation or rotational
inertia. It is characterized by its
mass.
Examples of applications where you might choose to
idealize part of a system as a particle include:
1. Calculating the orbit of a satellite for this application, you don’t need to know
the orientation of the satellite, and you know that the satellite is very small
compared with the dimensions of its orbit.
2. A molecular dynamic simulation, where you wish to
calculate the motion of individual atoms in a material. Most of the mass of an atom is usually
concentrated in a very small region (the nucleus) in comparison to inter-atomic
spacing. It has negligible rotational inertia.
This approach is also sometimes used to model entire molecules, but
rotational inertia can be important in this case.
Obviously, if you choose to idealize an object as a
particle, you will only be able to calculate its position. Its orientation or rotation cannot be
computed.
3.1.2 Position, velocity, acceleration relations for a
particle (Cartesian coordinates)
 In most practical applications we are interested in
the position or the velocity (or speed) of the particle as a
function of time. But Newton’s laws will only tell us its
acceleration. We therefore need equations
that relate the position, velocity and acceleration.
In most practical applications we are interested in
the position or the velocity (or speed) of the particle as a
function of time. But Newton’s laws will only tell us its
acceleration. We therefore need equations
that relate the position, velocity and acceleration.
Position
vector: In Newtonian physics we
have to measure position and motion in a so-called ‘Inertial Frame’. This concept will be discussed in more detail
in Section 3.2. For now, suppose that we
can identify
1. Three, mutually perpendicular, fixed directions in
space: the three directions are described by unit vectors
2.
We choose a
convenient stationary (or non-accelerating) point to use as origin.
The position vector
(relative to the origin) is then specified by the three distances (x,y,z) shown in the figure.
In dynamics problems, x,y,z can all be functions of time, but are fixed.
Velocity
vector: By definition, the
velocity is the derivative of the position vector with respect to time
(following the usual machinery of calculus)
Velocity is a vector, and
can therefore be expressed in terms of its Cartesian components
You can visualize a velocity
vector as follows
·
The direction of the vector is parallel to
the direction of motion
·
The magnitude of the vector is the speed of
the particle (in meters/sec, for example).
When
both position and velocity vectors are expressed in terms Cartesian components,
it is simple to calculate the velocity from the position vector. For this case, the basis vectors are constant
(independent of time) and so
This is really three
equations one for each velocity component, i.e.
Acceleration
vector: The
acceleration is the derivative of the velocity vector with respect to time; or,
equivalently, the second derivative of the position vector with respect to
time.
The acceleration is a
vector, with Cartesian representation .
Like
velocity, acceleration has magnitude and direction. Sometimes it may be
possible to visualize an acceleration vector for example, if you know your particle is
moving in a straight line, the acceleration vector must be parallel to the
direction of motion; or if the particle moves around a circle at constant
speed, its acceleration is towards the center of the circle. But sometimes you can’t trust your intuition
regarding the magnitude and direction of acceleration, and it can be best to
simply work through the math.
The relations between Cartesian
components of position, velocity and acceleration are
3.1.3 Review of some ideas from calculus
To analyze motion, we often
have to calculate accelerations given position vectors as a function of time,
or (more commonly) calculate velocity and position by integrating
accelerations.
You
should have been beaten into submission with this sort of problem in calculus
courses (and maybe some physics courses as well) so we’ll just review the most
important procedures here as a reminder.
We will focus on the generic one-dimensional problem: given ,
calculate v and x; or vice-versa.
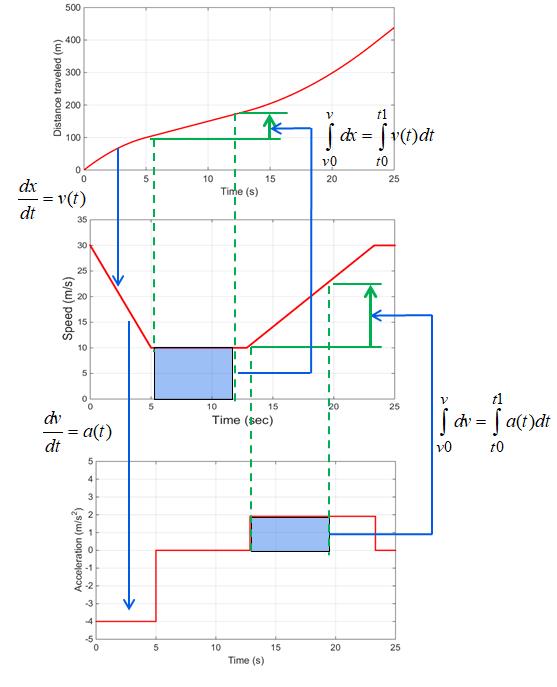
Calculating positions,
velocities and accelerations graphically
You will remember that:
·
Speed is the
slope of the distance-v-time curve
·
Distance is the
area under the speed-v-time curve
Or alternatively
·
Acceleration is
the slope of the speed-v-time curve
·
Speed is the area
under the acceleration-v-time curve
These ideas are illustrated
in the figure below: if you can sketch a graph of acceleration, velocity or
position, you can often use geometry to calculate all the other quantities of
interest.
Rules for
integrating accelerations and speeds
·
Acceleration
given as a function of time
Example:
·
Acceleration
given as a function of speed
Example:
·
Acceleration
given as a function of distance
Example
·
Velocity given as
a function of time
Example
·
Velocity given as
a separable function of position and time
Example
3.1.4 Examples using position-velocity-acceleration
relations
It
is important for you to be comfortable with calculating velocity and
acceleration from the position vector of a particle. You will need to do this in nearly every
problem we solve. In this section we
provide a few examples. Each example
gives a set of formulas that will be useful in practical applications.
Example
1: Constant acceleration along a straight line. There
are many examples where an object moves along a straight line, with constant
acceleration. Examples include free
fall near the surface of a planet (without air resistance), the initial stages
of the acceleration of a car, or and aircraft during takeoff roll, or a
spacecraft during blastoff.
Suppose that
The
particle moves parallel to a unit vector i
The
particle has constant acceleration, with magnitude a
At
time the particle has speed
At time the particle has position vector
The position, velocity
acceleration vectors are then
Verify
for yourself that the position, velocity and acceleration (i) have the correct
values at t=0 and (ii) are related by
the correct expressions (i.e. differentiate the position and show that you get
the correct expression for the velocity, and differentiate the velocity to show
that you get the correct expression for the acceleration).
HEALTH WARNING: These results can only
be used if the acceleration is constant.
In many problems acceleration is a function of time, or position in this case these formulas cannot be used.
People who have taken high school physics classes have used these formulas to
solve so many problems that they automatically apply them to everything this works for high school problems but not always
in real life!
 Example 2: Simple Harmonic Motion: The
vibration of a very simple spring-mass system is an example of simple harmonic motion.
Example 2: Simple Harmonic Motion: The
vibration of a very simple spring-mass system is an example of simple harmonic motion.
In simple harmonic motion
(i) the particle moves along a straight line; and (ii) the position, velocity
and acceleration are all trigonometric functions of time.
For example, the position
vector of the mass might be given by
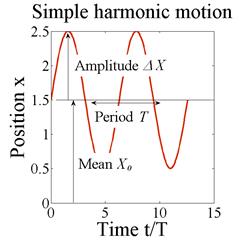
Here
is the average length of the spring, is the maximum length of the spring, and T is the time for the mass to complete
one complete cycle of oscillation (this is called the `period’ of oscillation).
Harmonic
vibrations are also often characterized by the frequency of vibration:
·
The frequency in
cycles per second (or Hertz) is related to the period by f=1/T
·
The angular frequency is related to the
period by
The
motion is plotted in the figure on the right.
The
velocity and acceleration can be calculated by differentiating the position, as
follows
Note that:
·
The velocity and
acceleration are also harmonic, and have the same period and frequency as the
displacement.
·
If you know the
frequency, and amplitude and of either the displacement, velocity, or
acceleration, you can immediately calculate the amplitudes of the other two. For example, if ,
,
denote the amplitudes of the displacement,
velocity and acceleration, we have that
 Example 3: Motion at constant speed around a circular
path Circular motion is also very common examples include any rotating machinery,
vehicles traveling around a circular path, and so on.
Example 3: Motion at constant speed around a circular
path Circular motion is also very common examples include any rotating machinery,
vehicles traveling around a circular path, and so on.
The
simplest way to make an object move at constant speed along a circular path is
to attach it to the end of a shaft (see the figure), and then rotate the shaft
at a constant angular rate. Then, notice
that
·
The angle increases at constant rate. We can write ,
where is the (constant)
angular speed of the shaft, in radians/seconds.
·
The speed of the
particle is related to by . To see this, notice that the circumferential
distance traveled by the particle is . Therefore, .
For this example the
position vector is
The velocity can be
calculated by differentiating the position vector.
Here, we have used the
chain rule of differentiation, and noted that .
The acceleration vector
follows as
Note that
(i) The magnitude of the velocity is ,
and its direction is (obviously!) tangent to the path (to see this, visualize
(using trig) the direction of the unit vector
(ii)
The magnitude of the acceleration is and its direction is towards the center of the
circle. To see this, visualize (using trig) the direction of the unit vector
We can write these
mathematically as
 Example 4: More general motion around a circular path
Example 4: More general motion around a circular path
We next look at more
general circular motion, where the particle still moves around a circular path,
but does not move at constant speed. The
angle is now a general function of time.
We can write down some
useful scalar relations:
·
Angular rate:
·
Angular
acceleration
·
Speed
·
Rate of change of
speed
We can now calculate vector
velocities and accelerations
The velocity can be
calculated by differentiating the position vector.
The acceleration vector
follows as
It is often more convenient
to re-write these in terms of the unit vectors n and t normal and
tangent to the circular path, noting that , . Then
These
are the famous circular motion formulas
that you might have seen in physics class.
Using MATLAB
‘live scripts’
If
you find that your calculus is a bit rusty you can use MATLAB to do the tedious
work for you. For example, to
differentiate the vector
you would type
syms x(t) y(t) z(t) r(t) v(t) a(t)
r(t)
= [x(t),y(t),z(t)]
v(t) = diff(r(t),t)
a(t) = diff(v(t),t)
It is essential to type in the (t) after x,y,and z if you don’t do this, MAPLE assumes that these
variables are constants, and takes their derivative to be zero. You must enter (t) after _any_ variable that
changes with time.
Here’s
how you would do the circular motion calculation if you only know that the
angle is some arbitrary function of time, but don’t
know what the function is
syms R theta(t) r(t) v(t) a(t)
r(t)
= [R*cos(theta(t)),R*sin(theta(t))]
v(t) = simplify(diff(r(t),t))
a(t) = simplify(diff(v(t),t))
MATLAB
can make very long and complicated calculations fairly painless. It is a godsend to engineers, who generally
find that every real-world problem they need to solve is long and
complicated. But of course it’s
important to know what the program is doing so keep taking those math classes…
3.1.5 Velocity
and acceleration in normal-tangential coordinates.
In
some cases it is helpful to use special basis vectors to write down velocity
and acceleration vectors, instead of a fixed {i,j,k} basis. If you see
that this approach can be used to quickly solve a problem go ahead and use it. If not, just use Cartesian coordinates
this will always work, and with Matlab is not
very hard.
Normal-tangential coordinates for
particles moving along a prescribed planar path
If a particle moves along some known path, the formulas for velocity and acceleration look much
simpler if they are expressed as components using a basis oriented parallel and
perpendicular to the path. These basis
vectors are called ‘normal-tangential’ coordinates.
For
example, normal-tangential coordinates are nearly always used in vehicle
dynamics problems, because the directions point ‘forwards’ ‘sideways’ and
‘vertically’, so it is easy to understand the significance of accelerations
along ,
while {i,j,k} components are generally
very difficult to interpret.
To
use normal-tangential coordinates we
·
Specify the path
by writing down the position vector of a point on the path in terms of
the distance s travelled along the
path. For a 2D curve:
·
Introduce two
unit vectors n and t, with t pointing tangent to the path and n pointing normal to the path, towards the center of curvature
(this sounds a bit scary, but n is
just perpendicular to t, and if the
path curves to the right n points to
the right; if it curves to the left, it points to the left).
·
Introduce the
radius of curvature of the path R
(in most problems we solve R is given,
but we’ll give some formulas later).
·
Denote the speed
of the particle by V. The speed can vary with time.
We
then use the following formulas to calculate speed, velocity and acceleration
We
can also use the formula to write velocity and acceleration in terms of
distance traveled along the path and its time derivatives
In
words, these equations tell us:
(1)
The direction of
the velocity vector of a particle is tangent to its path.
(2)
The magnitude of
the velocity vector is equal to the speed.
(3)
The speed is the
derivative of distance traveled with respect to time
(4)
The acceleration
vector can be constructed by adding two components:
·
the component of
acceleration tangent to the particle’s path is equal to . We call this the ‘tangential component’ of
acceleration.
·
The component of
acceleration perpendicular to the path (towards the center of curvature) is
equal to . We call this the ‘normal component’ of
acceleration.
Deriving the normal-tangential formulas
In
Newtonian physics, we have to start by defining an ‘inertial frame’, which
(mathematically) is always a non-accelerating and non-rotating Cartesian {i,j,k} basis. The x,y,z
coordinates of a particle and their derivatives tell us the Newtonian
definitions of position, velocity and acceleration.
As
we will see with specific examples below, some problems can be simplified by
replacing the x,y,z coordinates with
some simpler set of coordinates (these might be angles, or distances, or some
combination of both that describe our system).
Whenever we use new coordinated, we proceed by writing down the x,y,z coordinates in terms of our
new ones. We usually also replace the {i,j,k}
basis with a new set of directions that are defined by our new
coordinate system. As we make small
changes to our new coordinates, we will move around in space the directions we move usually have some
special significance, so it is helpful to write down all vector quantities of
interest as components in the basis defined by these new directions.
This sounds very abstract, so
let’s see how it works for normal-tangential coordinates.
For problems where a particle
moves along a known path, we can always write down the position of a point on
the path in terms of the distance travelled along the path. For a 2D curve:
Here
s is the arc-length traveled along
the path. Since the path is known (x,y are given functions) we only need
one coordinate (s) to specify where
we are.
We
now generate some basis vectors by working out how position vector changes if
we make small changes to our new coordinate s. It is convenient to define
The
vectors have unit length, are mutually perpendicular,
and therefore define a new Cartesian basis.
We can define any vector in this basis in the usual way.
With
these definitions we are now ready to derive our formulas for velocity and
acceleration:
These
are all just repeated applications of the chain rule….
Examples using normal-tangential
coordinates
 We’ll work through a few examples below that show how
to work with normal-tangential coordinates.
These are all quite hard: you need to be able to use lots of basic ideas
from vectors and calculus to be able to answer them.
We’ll work through a few examples below that show how
to work with normal-tangential coordinates.
These are all quite hard: you need to be able to use lots of basic ideas
from vectors and calculus to be able to answer them.
Example:
Circular motion in normal-tangential coordinates
We
already analyzed circular motion as a special case. We’ll revisit that example as an example of
motion along a general curved path.
The
distance traveled around the circle is the arc length s.
The
arc-length formula gives
Therefore
(just
use trig)
The
tangent vector is (this
agrees with our earlier formula)
The
normal vector is (also the same as our earlier formula)
The
formula says velocity vector is (the
same as our earlier formula)
The
formula for acceleration vector is (also
agrees with the earlier result)
 Example (a simple exam problem):
Example (a simple exam problem):
A
vehicle starts at rest at A and travels with constant tangential acceleration around a circular path. To avoid skidding, the magnitude of the
acceleration must not exceed , where is the friction coefficient between tires and
road, and g is the gravitational
acceleration. Find a formula for the
shortest possible time to reach B.
We
can use the formula: in normal-tangential coordinates
Since
we are told is constant and the car is at rest at t=0 we can use the constant acceleration
formula to find V
Furthermore
The
arc-length from A to B is so the time to travel from A to B follows as
We
can find from the condition that
(notice that we just used the usual Cartesian formula to
find the magnitude of the vector). The maximum acceleration occurs at B, so we
can substitute for t and solve for
Finally
remember so
 Example: Design speed limit for a curvy road: As
a consulting firm specializing in highway design, we have been asked to develop
a design formula that can be used to calculate the speed limit for cars that
travel along a curvy road.
Example: Design speed limit for a curvy road: As
a consulting firm specializing in highway design, we have been asked to develop
a design formula that can be used to calculate the speed limit for cars that
travel along a curvy road.
The
following procedure will be used:
·
The curvy road
will be approximated as a sine wave as shown in the figure for a given road, engineers will measure
values of A and L that fit the path.
·
Vehicles will be
assumed to travel at constant speed V
around the path your mission is to calculate the maximum
allowable value of V
·
For safety, the
magnitude of the acceleration of the car at any point along the path must be
less than 0.2g, where g is the gravitational acceleration. (Again, note that constant speed does not
mean constant acceleration, because the car’s direction is changing with time).
Our
goal, then, is to calculate a formula for the magnitude of the acceleration in
terms of V, A and L. The result can be used to deduce a formula
for the speed limit.
Calculation:
We
can solve this problem quickly using normal-tangential coordinates. Since the speed is constant, the acceleration
vector is
Our
only problem is that we don’t know R but we can use what we know about vectors
and normal-tangential coordinates to figure it out.
The
position vector is
,
where
x is some unknown function of
distance s traveled along the
path. We can calculate the tangent from
the formula for the tangent (and the chain rule)
We
know that t must be a unit vector,
therefore
We could separate variables
and integrate this to calculate x(s) if
we need it but in practice we don’t need to bother.
So now we know that
The normal vector n must be perpendicular to both t and k, so we can create it using
(the is because there are two vectors normal to
both t and k). Finally we know that
Since n is a unit vector, we can take the dot product of both sides of
this expression with n (from above)
Therefore
(using our earlier expression for ,
and noting that R is positive by
definition)
So now we know the
acceleration vector is
We
are interested in the magnitude of the acceleration…
We
see from this that the car has the biggest acceleration when .
The maximum acceleration follows as
The
formula for the speed limit is therefore
Now
we send in a bill for a big consulting fee…
3.1.6
Position, Velocity and Acceleration in cylindrical-polar coordinates.
 When solving problems involving central forces (forces
that attract particles towards a fixed point) it is often convenient to
describe motion using polar coordinates.
When solving problems involving central forces (forces
that attract particles towards a fixed point) it is often convenient to
describe motion using polar coordinates.
Polar coordinate formulas
Polar
coordinates are related to x,y
coordinates through
We
can also specify height out of the plane of the picture using the usual z coordinate.
Suppose
that the position of a particle is specified by its ‘polar coordinates’ relative to a fixed origin, as shown in the
figure. Let be a unit vector pointing in the radial
direction, and let be a unit vector pointing in the tangential
direction, i.e
The
position, velocity and acceleration of the particle can then be expressed as
In
most problems we solve, we just substitute known information about into these formulas.
Deriving the polar coordinate formulas
The
formulas for polar coordinate can be derived using the same ideas we used to
set up normal-tangential coordinates.
The general procedure to set up any new coordinate system in Newtonian
physics is:
(1)
Choose an
inertial frame this defines a stationary Cartesian basis
(2)
Choose some new
coordinates here we use and write down position vector in the inertial
frame in terms of these new coordinates.
For the cylindrical-polar system
(3) We now think about making very small changes to each
of . As we
do so, r will change. We define unit vectors that point in each of
the direction associated with making changes to :
mathematically this operation is
For the polar coordinate system it turns out that are mutually perpendicular and so are a
Cartesian basis. But note that the
directions are functions of . Regardless, we can express any vectors as
components in our new basis using the usual ideas the vector will be made up of contributions
parallel to each of the new basis vectors.
The
polar coordinate formulas now follow by simple calculus. Since we have chosen to work with instead of x,y,z
, and instead of
,
we would like to write down position, velocity and acceleration in the basis, terms of time derivatives of . Before we work through the details we have to
do some busy-work. Since are functions of we will need to know how to differentiate them
with respect to . To
do this we go back to their original definitions:
The
rest is just a tedious exercise in using the chain rule. The position vector can be written down by
inspection as . Then
Examples using polar coordinates
 Example
The robotic manipulator shown in the figure rotates with constant angular speed
about the k
axis. Find a formula for the
maximum allowable (constant) rate of extension if the acceleration of the gripper may not
exceed g.
Example
The robotic manipulator shown in the figure rotates with constant angular speed
about the k
axis. Find a formula for the
maximum allowable (constant) rate of extension if the acceleration of the gripper may not
exceed g.
We
can simply write down the acceleration vector, using polar coordinates. We identify and r=L,
so that
 Example: The position of a particle in polar
coordinates is given by (meters).
At the instant when , calculate the following quantities:
Example: The position of a particle in polar
coordinates is given by (meters).
At the instant when , calculate the following quantities:
·
The position
vector in components and in components
When so
·
The velocity
vector in and
The polar coordinate formula is m/s
By inspection we see that at the instant of interest, so
·
The acceleration
vector in components
m/s2
·
Unit vectors tangent and normal to the path, in . (Choose n
to point towards the center of curvature)
We know t is
parallel to v so
We can find n
in three ways: first, we know n must
be perpendicular to t and must lie
in the i,j plane (and hence is
perpendicular to k). Remember that you can create a vector perpendicular
to two others using a cross product, so . The
positive choice points towards the center of curvature (by inspection), and
note so
You
can also use the condition - if we assume then
Any that satisfies this (eg ) is perpendicular to t. But n must be a unit vector, and we know we want the vector to point
towards the origin (because the center of curvature of the path is inside the
turn). So we have to choose
The last (cumbersome, but general) way to do the
calculation is to note that must be parallel to n.
Dividing by the magnitude of this vector (to create a
unit vector) gives the same answer as before.
·
Tangential and
normal components of acceleration : we know (from ENGN30) that we can find the
component of a vector in a basis by dotting it with the basis vectors, so
m/s2
You
can also do this problem using the formula
. This
shows , which is not too hard to calculate (but is a
pain so I can’t be bothered). To find we would either have to use our MA0200
super-powers to find the radius of curvature of the path, or else use and then take the magnitude of the vector on
the left to get .
3.1.7 Measuring position, velocity and acceleration
If
you are designing a control system, you will need some way to detect the motion of the system you are trying to control. A vast array of different sensors is available
for you to choose from: see for example the list at http://www.sensorland.com/HowPage001.html
. A very short list of common sensors is
given below
1. GPS determines position on the earth’s surface by
measuring the time for electromagnetic waves to travel from satellites in known
positions in space to the sensor. Can
be accurate down to cm distances, but the sensor needs to be left in position
for a long time for this kind of accuracy.
A few m is more common.
2.  Optical or radio frequency position sensing measure position by (a) monitoring deflection
of laser beams off a target; or measuring the time for signals to travel from a
set of radio emitters with known positions to the sensor. Precision can vary from cm accuracy down to
light wavelengths.
Optical or radio frequency position sensing measure position by (a) monitoring deflection
of laser beams off a target; or measuring the time for signals to travel from a
set of radio emitters with known positions to the sensor. Precision can vary from cm accuracy down to
light wavelengths.
3. Capacitative displacement sensing determine position by measuring the
capacitance between two parallel plates.
The device needs to be physically connected to the object you are
tracking and a reference point. Can only measure distances of mm or less, but
precision can be down to micron accuracy.
4. Electromagnetic displacement sensing measures position by detecting electromagnetic
fields between conducting coils, or coil/magnet combinations within the
sensor. Needs to be physically connected
to the object you are tracking and a reference point. Measures displacements of order cm down to
microns.
5. Radar velocity sensing measures velocity by detecting the change in
frequency of electromagnetic waves reflected off the traveling object.
6. Inertial accelerometers: measure accelerations by
detecting the deflection of a spring acting on a mass.
Accelerometers
are also often used to construct an ‘inertial
platform,’ which uses gyroscopes to maintain a fixed orientation in space,
and has three accelerometers that can detect motion in three mutually
perpendicular directions. These
accelerations can then be integrated to determine the position. They are used in aircraft, marine
applications, and space vehicles where GPS cannot be used or where a backup is
needed for GPS. They are often combined
with GPS receivers as well: accelerometers are very good for measuring changes
in velocity and position over a short time interval, and GPS is very good over
long time intervals, so you can use ‘sensor fusion’ to make a sensor that uses
both signals to get the best possible measurement.
3.2 Calculating forces required to cause prescribed
motion of a particle
3.2.1 The Newtonian
Inertial Frame.
Newton’s laws are very familiar, and it is easy to write
them down without much thought. They do
have a flaw, however.
When
we use Newton’s laws, we assume that:
(1)
We can identify
some point in the universe that is not accelerating
(2)
We can identify
three mutually perpendicular directions that are ‘fixed’ in the sense that they
do not rotate.
Together,
these define a so-called ‘inertial frame’ a Cartesian coordinate system in which motion
obeys Newton’s laws.
For
engineering calculations, identifying a suitable origin and fixed directions
usually poses no difficulty. If we are
solving problems involving terrestrial motion over short distances compared
with the earth’s radius, we simply take a point on the earth’s surface as
fixed, and take three directions relative to the earth’s surface to be
fixed. If we are solving problems
involving motion in space near the earth, or modeling weather, we take the
center of the earth as a fixed point, (or for more complex calculations the
center of the sun); and choose axes to have a fixed direction relative to
nearby stars. Experiments show that
Newton’s laws predict motion sufficiently accurately for our needs. But there will always be some very small
error.
In
reality, an unambiguous inertial frame does not exist. We can only describe the relative motion of the mass in the universe, not its absolute
motion. The general theory of relativity
gives us a framework that avoids having to choose an inertial frame. More elaborate calculations show that Newton’s
laws are rigorous approximations to the general equations (in the sense of a
Taylor expansion of the more general equations for low particle speeds compared
with the speed of light), and would also (in principle) tell us the best choice
of directions to set up a Newtonian frame at any point in space.
3.2.2
Newton’s laws of motion for a particle
If
we ignore these conceptual difficulties, Newton’s laws for a particle are very
simple. Let
1. m denote
the mass of the particle
2. F denote the resultant force
acting on the particle (as a vector, in the
inertial frame)
3. a denote the acceleration
of the particle (again, as a vector in the inertial frame). Then
Occasionally, we use a
particle idealization to model systems which, strictly speaking, are not
particles. These are:
1. A large mass, which moves
without rotation (e.g. a car moving along a straight line)
2. A single particle which is
attached to a rigid frame with negligible mass (e.g. a person on a bicycle)
In these cases it may be necessary to consider the moments acting on the mass (or frame) in
order to calculate unknown reaction forces.
1. For a large mass which moves
without rotation, the resultant moment of external forces about the center
of mass must vanish.
2. For a particle attached to a
massless frame, the resultant moment of external forces acting on the frame about
the particle must vanish.
We
will see where this equation comes from when we analyze rigid body dynamics,
and we’ll also understand when it is no longer correct.
It is very important to take moments
about the correct point in dynamics problems! Forgetting this is the most
common reason to screw up a dynamics problem…
If you need to solve a problem where more than one
particle is attached to a massless frame, you have to draw a separate free body
diagram for each particle, and for the frame.
The particles must obey Newton’s
laws . The forces acting on the frame must obey and ,
(because the frame has no mass).
Newton’s
laws of motion can be used to calculate the forces required to make a particle
move in a particular way.
We use the following
general procedure to solve problems like this
(1)
Decide how to idealize the system (what are the particles?)
(2)
Draw a free body diagram showing the forces acting on each particle
(3) Consider the kinematics
of the problem. The goal is to calculate the acceleration of each particle in
the system you may be able to start by writing down the
position vector and differentiating it, or you may be able to relate the
accelerations of two particles (eg if two particles move together, their
accelerations must be equal).
(4)
Write down F=ma for each particle.
(5)
If you are solving a problem involving a massless frames (see, e.g. Example 3,
involving a bicycle with negligible mass) you also need to write down about the particle.
(5)
Solve the resulting equations for any unknown components of force or
acceleration (this is just like a statics problem, except the right hand side
is not zero).
It is best to show how this
is done by means of examples.
 Example 1: Estimate the minimum thrust
that must be produced by the engines of an aircraft in order to take off from
the deck of an aircraft carrier (the figure is from www.lakehurst.navy.mil/NLWeb/media-library.asp)
Example 1: Estimate the minimum thrust
that must be produced by the engines of an aircraft in order to take off from
the deck of an aircraft carrier (the figure is from www.lakehurst.navy.mil/NLWeb/media-library.asp)
We
will estimate the acceleration required to reach takeoff speed, assuming the
aircraft accelerates from zero speed to takeoff speed along the deck of the
carrier, and then use Newton’s
laws to deduce the force.
Data/ Assumptions:
1. The flight deck of a Nimitz class aircraft carrier is
about 300m long (http://www.naval-technology.com/projects/nimitz/)
but only a fraction of this is used for takeoff (the angled runway is used for
landing). We will take the length of
the runway to be d=200m
2.
We will assume
that the acceleration during takeoff roll is constant.
3. We will assume that the aircraft carrier is not moving
(this is wrong actually the aircraft carrier always moves at
high speed during takeoff. We neglect
motion to make the calculation simpler)
4. The FA18 Super Hornet is a typical aircraft used on a
carrier it has max catapult weight of m=15000kg http://www.boeing.com/defense-space/military/fa18ef/docs/EF_overview.pdf
5. The manufacturers are somewhat reticent about
performance specifications for the Hornet but 150 knots (77 m/s) is a reasonable guess for a
minimum controllable airspeed for this aircraft.
Calculations:
1.
Idealization:
We will idealize the aircraft as
a particle. We can do this because the
aircraft is not rotating during takeoff.
2.
 FBD: The figure
shows a free body diagram. represents the (unknown) force exerted on the
aircraft due to its engines.
FBD: The figure
shows a free body diagram. represents the (unknown) force exerted on the
aircraft due to its engines.
3. Kinematics: We must calculate the acceleration required to reach takeoff speed. We are given (i) the distance to takeoff d, (ii) the takeoff speed and (iii) the aircraft is at rest at the start
of the takeoff roll. We can therefore write down the position vector r and velocity v of the aircraft at takeoff, and use the straight line motion
formulas for r and v to calculate the time t to reach takeoff speed and the
acceleration a. Taking the origin at the initial position of
the aircraft, we have that, at the instant of takeoff
This
gives two scalar equations which can be solved for a and t
4.
EOM: The vector equation of motion for this problem is
5.
Solution: The i component
of the equation of motion gives an equation for the unknown force in terms of
known quantities
Substituting numbers gives the magnitude of the force
as F=222 kN. This is very close, but slightly greater
than, the 200kN (44000lb) thrust quoted on the spec sheet for the Hornet. Using a catapult to accelerate the aircraft,
speeding up the aircraft carrier, and increasing thrust using an afterburner
buys a margin of safety.
 Example 2: Mechanics
of Magic! You have no doubt seen the
simple `tablecloth trick’ in which a tablecloth is whipped out from underneath
a fully set table (if not, you can watch it at http://wm.kusa.gannett.edgestreams.net/news/1132187192333-11-16-05-spangler-2p.wmv)
Example 2: Mechanics
of Magic! You have no doubt seen the
simple `tablecloth trick’ in which a tablecloth is whipped out from underneath
a fully set table (if not, you can watch it at http://wm.kusa.gannett.edgestreams.net/news/1132187192333-11-16-05-spangler-2p.wmv)
In this problem we shall
estimate the critical acceleration that must be imposed on the tablecloth to
pull it from underneath the objects placed upon it.
We
wish to determine conditions for the tablecloth to slip out from under the
glass. We can do this by calculating the reaction forces acting between the
glass and the tablecloth, and see whether or not slip will occur. It is best to calculate the forces required
to make the glass move with the tablecloth (i.e. to prevent slip), and see if
these forces are big enough to cause slip.
1. Idealization: We will assume that the glass behaves like a particle (again, we can do
this because the glass does not rotate)
2.  FBD. The
figure shows a free body diagram for the glass.
The forces include (i) the weight; and (ii) the normal and tangential
components of reaction at the contact between the tablecloth and the glass. The normal and tangential forces must act
somewhere inside the contact area, but their position is unknown. For a more detailed discussion of contact
forces see Sects 2.4 and 2.5.
FBD. The
figure shows a free body diagram for the glass.
The forces include (i) the weight; and (ii) the normal and tangential
components of reaction at the contact between the tablecloth and the glass. The normal and tangential forces must act
somewhere inside the contact area, but their position is unknown. For a more detailed discussion of contact
forces see Sects 2.4 and 2.5.
3.
Kinematics We are assuming that the glass has the same acceleration
as the tablecloth. The table cloth is moving in the i direction, and has magnitude a.
The acceleration vector is therefore .
4.
EOM. Newton’s
laws of motion yield
5.
Solution: The i and j components of the vector equation
must each be satisfied (just as when you solve a statics problem), so that
Finally,
we must use the friction law to decide whether or not the tablecloth will slip
from under the glass. Recall that, for
no slip, the friction force must satisfy
where
is the friction coefficient. Substituting for T and N from (5) shows
that for no slip
To
do the trick, therefore, the acceleration must exceed . For a friction coefficient of order 0.1, this
gives an acceleration of order . There is a special trick to pulling the
tablecloth with a large acceleration but that’s a secret.
 Example 3:
Bicycle Safety. If a bike rider brakes too hard on the front wheel, his
or her bike will tip over (the figure is from http://www.thosefunnypictures.com/picture/7658/bike-flip.html). In this example we investigate the conditions
that will lead the bike to capsize, and identify design variables that can
influence these conditions.
Example 3:
Bicycle Safety. If a bike rider brakes too hard on the front wheel, his
or her bike will tip over (the figure is from http://www.thosefunnypictures.com/picture/7658/bike-flip.html). In this example we investigate the conditions
that will lead the bike to capsize, and identify design variables that can
influence these conditions.
If
the bike tips over, the rear wheel leaves the ground. If this happens, the reaction force acting on
the wheel must be zero so we can detect the point where the bike is
just on the verge of tipping over by calculating the reaction forces, and
finding the conditions where the reaction force on the rear wheel is zero.
1.  Idealization:
Idealization:
a. We will idealize the rider as a particle (apologies to
bike racers but that’s how we think of you…). The particle
is located at the center of mass of the rider.
The figure shows the most important design parameters- these are the
height of the rider’s COM, the wheelbase L
and the distance of the COM from the rear wheel.
b. We assume that the bike is a massless frame. The wheels are also assumed to have no
mass. This means that the forces acting
on the wheels must satisfy and - and can be analyzed using methods of
statics. If you’ve forgotten how to
think about statics of wheels, you should re-read the notes on this topic in particular, make sure you understand the
nature of the forces acting on a freely rotating wheel (Section 2.4.6 of the
reference notes).
c. We assume that the rider brakes so hard that the front
wheel is prevented from rotating. It
must therefore skid over the ground.
Friction will resist this sliding. We denote the friction coefficient at
the contact point B by .
d. The rear wheel is assumed to rotate freely.
e. We neglect air resistance.
2. FBD. The
figure shows a free body diagram for the rider and for the bike together. Note that
a. A normal and tangential force acts at the contact
point on the front wheel (in general, both normal and tangential forces always
act at contact points, unless the contact happens to be frictionless). Because the contact is slipping it is
essential to draw the friction force in the correct direction the force must resist the motion of the bike;
b. Only a normal force acts at the contact point on the
rear wheel because it is freely rotating,
and behaves like a 2-force member.
3. Kinematics The
bike is moving in the i direction.
As a vector, its acceleration is therefore ,
where a is unknown.
4. EOM: Because
this problem includes a massless frame, we must use two equations of motion ( and ). It is essential to take moments about the
particle (i.e. the rider’s COM).
gives
gives
The two nonzero components
of and the one nonzero component of give us three scalar equations
We
have four unknowns the reaction components and the acceleration a so we need another equation.
The missing equation is the friction
law
5.
Solution: (tedious
algebra you could avoid this by using Matlab)
The
third equation and the friction law show that
Multiply
by and subtract it from this equation:
We
are interested in finding what makes the reaction force at A go to zero (that’s
when the bike is about to tip). So
 This tells us that the bike will tip if the friction
coefficient exceeds a critical magnitude, which depends on the geometry of the
bike. The simplest way to design a
tip-resistant bike is to make the height of the center of mass h small, and the distance (L-d) between the front wheel and the COM
as large as possible.
This tells us that the bike will tip if the friction
coefficient exceeds a critical magnitude, which depends on the geometry of the
bike. The simplest way to design a
tip-resistant bike is to make the height of the center of mass h small, and the distance (L-d) between the front wheel and the COM
as large as possible.
A
`recumbent’ bike is one way to achieve this the figure (from http://en.wikipedia.org/wiki/Recumbent_bicycle)
shows an example. The recumbent design offers many other significant advantages
over the classic bicycle besides tipping resistance.
 Example 4: A
stupid problem that you might find in the FE professional engineering exam. The
purpose of this problem is to show what you need to do to solve problems
involving more than one particle.
Example 4: A
stupid problem that you might find in the FE professional engineering exam. The
purpose of this problem is to show what you need to do to solve problems
involving more than one particle.
Two
weights of mass and are connected by a cable passing over two
freely rotating pulleys as shown. They
are released, and the system begins to move.
Find an expression for the tension in the cable connecting the two
weights.
1.  Idealization
The masses will be idealized as particles; the
cable is inextensible and the mass of the pulleys is neglected. This means the internal forces in the cable,
and the forces acting between cables/pulleys must satisfy and ,
and we can treat them as though they were in static equilibrium.
Idealization
The masses will be idealized as particles; the
cable is inextensible and the mass of the pulleys is neglected. This means the internal forces in the cable,
and the forces acting between cables/pulleys must satisfy and ,
and we can treat them as though they were in static equilibrium.
2.
FBD we have to draw a separate FBD for each
particle. Since the pulleys and cable
are massless, the tension T in the
cable is constant.
3.
Kinematics We know that
both masses must move in the j
direction. We also know that the masses
always move at the same speed but in opposite directions. Therefore, their accelerations must be equal
and opposite. We can express this
mathematically as
4. EOM: We must
write down two equations of motion, as there are two masses
We
now have three equations for three unknowns (the unknowns are and T).
5.
Solution: More
algebra. We can eliminate so that the last two equations are:
Now
we can multiply the first equation by and the second by and add them
So
We pass!
 Example 5:
Another stupid FE exam problem: The figure
shows a small block on a rotating bar.
The contact between the block and the bar has friction coefficient . The bar rotates at constant angular speed . Find the critical angular velocity that will
just make the block start to slip when . Which way does the block slide?
Example 5:
Another stupid FE exam problem: The figure
shows a small block on a rotating bar.
The contact between the block and the bar has friction coefficient . The bar rotates at constant angular speed . Find the critical angular velocity that will
just make the block start to slip when . Which way does the block slide?
The general approach to
this problem is the same as for the Magic trick example we will calculate the reaction force exerted
by the bar on the block, and see when the forces are large enough to cause slip
at the contact. We analyze the motion
assuming the slip does not occur, and
then find out the conditions where this can no longer be the case.
1.
 Idealization We will idealize the block as a particle. This is dangerous, because the block is
clearly rotating. We hope that because
it rotates at constant rate, the rotation will not have a significant effect but we can only check this once we know how to
deal with rotational motion.
Idealization We will idealize the block as a particle. This is dangerous, because the block is
clearly rotating. We hope that because
it rotates at constant rate, the rotation will not have a significant effect but we can only check this once we know how to
deal with rotational motion.
2.
FBD: The figure shows a free body diagram for the
block. The block is subjected to a
vertical gravitational force, and reaction forces at the contact with the
bar. Since we have assumed that the
contact is not slipping, we can choose the direction of the tangential
component of the reaction force arbitrarily.
The resultant force on the block is
3.
Kinematics We can use the
circular motion formula to write down the acceleration of tbe block (see
section 3.1.3)
4.
EOM: The equation of motion is
5.
Solution: The i and j components of the equation of motion
can be solved for N and T .
Doing this by hand is a pain, but Matlab makes it painless
syms T
N theta m r omega g real
eq1
= T*cos(theta)-N*sin(theta) == -m*r*omega^2*cos(theta);
eq2 = N*cos(theta)+T*sin(theta)-m*g == -m*r*omega^2*sin(theta);
[N,T] = (solve([eq1,eq2],[N,T]));
N = simplify(N)
T = simplify(T)
To
find the point where the block just starts to slip, we use the friction
law. Recall that, at the point of slip
For
the block to slip with
so
the critical angular velocity is . Since the tangential traction T is negative, and the friction force
must oppose sliding, the block must
slide outwards, i.e. r is increasing
during slip.
 Alternative
method of solution using normal-tangential coordinates
Alternative
method of solution using normal-tangential coordinates
We
will solve this problem again, but this time we’ll use the short-cuts described
in Section 3.1.4 to write down the acceleration vector, and we’ll write down
the vectors in Newton’s laws of motion in terms of the unit vectors n and t normal and tangent to the object’s path.
 (i) Acceleration vector If the block does not slip, it moves with
speed around a circular arc with radius r.
Its acceleration vector has magnitude and direction parallel to the unit vector n.
(i) Acceleration vector If the block does not slip, it moves with
speed around a circular arc with radius r.
Its acceleration vector has magnitude and direction parallel to the unit vector n.
(ii)
The force vector can be resolved into components parallel to n and t. Simple trig on the free
body diagram shows that
(iii)
Newton’s laws then give
The components of this vector
equation parallel to t and n yield two equations, with solution
This is the same solution
as before. Normal-tangential
coordinates makes the equations and algebra much simpler, however.
Example 6: Window blinds. Have you ever
wondered how window shades work? You
give the shade a little downward jerk, let it go, and it winds itself up. If you pull the shade down slowly, it stays
down.
The
figure shows the mechanism (which probably only costs a few cents to
manufacture) that achieves this remarkable feat of engineering. It’s called an `inertial latch’ the same principle is used in the inertia
reels on the seatbelts in your car.
The
picture shows an enlarged end view of the window shade. The hub, shown in brown, is fixed to the
bracket supporting the shade and cannot rotate.
The drum, shown in peach, rotates as the shade is pulled up or down. The drum is attached to a torsional spring,
which tends to cause the drum to rotate counterclockwise, so winding up the
shade. The rotation is prevented by the
small dogs, shown in red, which engage with the teeth on the hub. You can pull the shade downwards freely,
since the dogs allow the drum to rotate counterclockwise.
To
raise the shade, you need to give the end of the shade a jerk downwards, and
then release it. When the drum rotates
sufficiently quickly (we will calculate how quickly shortly) the dogs open up,
as shown on the right. They remain open
until the drum slows down, at which point the topmost dog drops and engages
with the teeth on the hub, thereby locking up the shade once more.
We
will estimate the critical rotation rate required to free the rotating drum.
1.
 Idealization We will idealize the topmost dog as a particle
on the end of a massless, inextensible rod, as shown in the figure.
Idealization We will idealize the topmost dog as a particle
on the end of a massless, inextensible rod, as shown in the figure.
a.
We will assume that the drum rotates at
constant angular rate . Our goal is to calculate the critical speed
where the dog is just on the point of dropping down to engage with the hub.
b.
When the drum spins
fast, the particle is contacts the outer rim of the drum a normal force acts at the contact. When the dog is on the point of dropping this
contact force goes to zero. So our goal
is to calculate the contact force, and then to find the critical rotation rate
where the force will drop to zero.
c.
 We neglect friction.
We neglect friction.
2.
FBD. The figure shows a free body diagram for the
particle. The particle is subjected to: (i) a reaction force N where it contacts the rim; (ii) a
tension T in the link, and (iii)
gravity. The resultant force is
3.
Kinematics We can use the
circular motion formula to write down the acceleration of the particle(see
section 3.1.3)
4.
EOM: The equation of motion is
5.
Solution: The i and j components of the equation of motion
can be solved for N and T MAPLE makes this painless
syms T
N theta m R omega g phi real
eq1
= -T*cos(phi-theta) - N*cos(theta) == -R*omega^2*cos(theta);
eq2 = -N*sin(theta)+T*sin(phi-theta)-m*g == -R*omega^2*sin(theta);
[T,N] = solve([eq1,eq2],[T,N]);
T = simplify(T)
N = simplify(N)
The normal
reaction force is therefore
We
are looking for the point where this can first become zero or negative. Note that
at the point where =0. The
smallest value of N therefore occurs
at this point, and has magnitude
The
critical speed where N=0 follows as
Changing the angle and the radius R gives a convenient way to control the critical speed in designing
an inertial latch.
 Alternative solution using polar
coordinates
Alternative solution using polar
coordinates
We’ll work through the same problem again, but this time
handle the vectors using polar coordinates.
1. FBD. The figure
shows a free body diagram for the particle. The particle is subjected to: (i) a
reaction force N where it contacts
the rim; (ii) a tension T in the
link, and (iii) gravity. The resultant
force is
2. Kinematics The acceleration vector is now
3. EOM: The
equation of motion is
4. Solution: The
components of the equation of motion can be
solved for N and T . If we use polar
coordinates we can do this by hand the component shows that
We
can substitute this back into the component to get
We
are looking for the point where this can first become zero or negative. Note that
at the point where =0. The
smallest value of N therefore occurs
at this point, and has magnitude
The
critical speed where N=0 follows as
Changing the angle and the radius R gives a convenient way to control the critical speed in designing
an inertial latch.
 Example 7:
Aircraft Dynamics Aircraft performing
certain instrument approach procedures (such as holding patterns or procedure
turns) are required to make all turns at a standard rate, so that a complete
360 degree turn takes 2 minutes. All turns
must be made at constant altitude and constant speed, V.
Example 7:
Aircraft Dynamics Aircraft performing
certain instrument approach procedures (such as holding patterns or procedure
turns) are required to make all turns at a standard rate, so that a complete
360 degree turn takes 2 minutes. All turns
must be made at constant altitude and constant speed, V.
People
who design instrument approach procedures need to know the radius of the
resulting turn, to make sure the aircraft won’t hit anything. Engineers designing the aircraft are
interested in the forces needed to complete the turn specifically, the load factor, which is the ratio of the lift force on the aircraft
to its weight.
In
this problem we will calculate the radius of the turn R and the bank angle required, as well as the load factor caused by
the maneuver, as a function of the aircraft speed V.
Before
starting the calculation, it is helpful to understand what makes an aircraft
travel in a circular path. Recall that
1. If an object travels at constant speed around a
circle, its acceleration vector has constant magnitude, and has direction
towards the center of the circle
2. A force must act on the aircraft to produce this
acceleration i.e. the resultant force on the aircraft must
act towards the center of the circle.
The necessary force comes from the
horizontal component of the lift force the pilot banks the wings, so that the lift
acts at an angle to the vertical.
With
this insight, we expect to be able to use the equations of motion to calculate
the forces.
1.
Idealization The aircraft is idealized as a particle it’s not obvious that this is accurate,
because the aircraft clearly rotates as it travels around the curve. However, the forces we wish to calculate turn
out to be fully determined by F=ma and are not influenced by the rotational
motion.
2.
 FBD. The
figure shows a free body diagram for the aircraft. It is subjected to (i) a gravitational force
(mg); (ii) a thrust from the engines ,
(iii) a drag force ,
acting perpendicular to the direction of motion, and (iv) a lift force ,
acting perpendicular to the plane of the wings.
FBD. The
figure shows a free body diagram for the aircraft. It is subjected to (i) a gravitational force
(mg); (ii) a thrust from the engines ,
(iii) a drag force ,
acting perpendicular to the direction of motion, and (iv) a lift force ,
acting perpendicular to the plane of the wings.
The resultant force is
(you may find the components of the lift force
difficult to visualize to see where these come from, note that the
lift force can be projected onto components along OR and the k direction as . Then note that .)
3. Kinematics
a.
The aircraft moves at
constant speed around a circle, so the angle ,
where is the (constant)
angular speed of the line OP. Since the aircraft completes a turn in two
minutes, we know that rad/sec
b. The position vector of the plane is
We can differentiate this expression with respect to
time to find the velocity
c.
The magnitude of
the velocity is ,
so if the aircraft flies at speed V,
the radius of the turn must be
d.
Differentiating
the velocity gives the acceleration
4.
EOM: The equation of motion is
5.
Solution: The i j and k components of the equation of motion give three equations that
can be solved for ,
and . We assume that the drag force is known, since
this is a function of the aircraft’s speed.
syms FT
FD FL alpha theta R m omega g V real
eq1
= (FT-FD)*cos(theta)-FL*sin(alpha)*sin(theta)==-m*V*omega*sin(theta);
eq2 = (FT-FD)*cos(theta)-FL*sin(alpha)*cos(theta)==-m*V*omega*cos(theta);
eq3 = FL*cos(alpha)-m*g ==0;
[FL,alpha,FT] = solve([eq1,eq2,eq3],[FL,alpha,FT]);
FL = simplify(FL)
alpha = simplify(alpha)
FT = simplify(FT)
(The two solutions are a bit
weird, but to a mathematician having the airplane fly upside down and generate
negative lift is a perfectly acceptable solution)
We can calculate values of ,
and the load factor for a few aircraft
a.
Cessna 150 V=70knots
(36 m/s) : R=690m,
b.
Boeing 747: V=200
knots (102 m/s) R=1950m,
c.
F111 V=300 knots (154 m/s) R=2950m,
 Alternative
solution using normal-tangential coordinates
Alternative
solution using normal-tangential coordinates
This problem can also be solved
rather more quickly using normal and tangential basis vectors.
(i) Acceleration vector. The
aircraft travels around a circular path at constant speed, so its acceleration
is
where n is a unit vector pointing towards the center of the circle.
(ii) Force vector. The force vector can be written in terms of the unit
vectors n,t,k as
(iii) Newton’s law
The
n, t and k components of
this equation give three equations that can be solved for ,
and . We can easily do this by hand
3.3 Deriving and solving equations of motion for systems of particles
We
next turn to the more difficult problem of predicting the motion of a system
that is subjected to a set of forces.
3.3.1
General procedure for deriving and solving equations of motion for systems of
particles
It is very straightforward to analyze the motion of
systems of particles. You should always
use the following procedure
1. Introduce a set of variables
that can describe the motion of the system.
Don’t worry if this sounds vague it will be clear what this means when we solve
specific examples.
2. Write down the position
vector of each particle in the system in terms of these variables
3. Differentiate the position
vector(s), to calculate the velocity and acceleration of each particle in terms
of your variables;
4. Draw a free body diagram
showing the forces acting on each particle.
You may need to introduce variables to describe reaction forces. Write down the resultant force vector.
5. Write down Newton’s law for each particle. This will generate up to 3 equations of
motion (one for each vector component) for each particle.
6. If you wish, you can eliminate
any unknown reaction forces from Newton’s
laws. If you are trying to solve the equations by hand, you should always do
this; of you are using MATLAB, it’s not usually necessary you can have MATLAB calculate the reactions
for you. The result will be a set of differential equations for the variables
defined in step (1)
7. If you find you have fewer
equations than unknown variables, you should look for any constraints that restrict the motion of the particles. The constraints must be expressed in terms of
the unknown accelerations.
8. Identify the initial conditions for the variables
defined in (1). These are usually the
values of the unknown variables, their time derivatives, at time t=0. If you happen to know the values of
the variables at some other instant in time, you can use that too. If you don’t know their values at all, you should
just introduce new (unknown) variables to denote the initial conditions.
9. Solve the differential
equations, subject to the initial conditions.
Steps (3) (6) and (8) can usually be done on the
computer, so you don’t actually have to do much calculus or math.
Sometimes, you can avoid solving the equations of
motion completely, by using conservation
laws conservation of energy, or conservation of
momentum to calculate quantities of interest. These short-cuts will be discussed in the
next chapter.
3.3.2
Simple examples of equations of motion and their solutions
The general process described in the preceding
section can be illustrated using simple examples. In this section, we derive equations of
motion for a number of simple systems, and find their solutions.
The purpose of these examples is to illustrate the
straightforward, step-by-step procedure for analyzing motion in a system. Although we solve several problems of
practical interest, we will simply set up and solve the equations of motion
with some arbitrary values for system parameter, and won’t attempt to explore
their behavior in detail. More detailed
discussions of the behavior of dynamical systems will follow in later chapters.
Example 1: Trajectory of
a particle near the earth’s surface (no air resistance)
At time t=0,
a projectile with mass m is launched from a position with
initial velocity vector . Calculate its trajectory as a function of
time.
1.
Introduce variables to describe the
motion: We can simply use the Cartesian coordinates of the
particle
2. Write down the position vector in
terms of these variables:
3. Differentiate the position vector
with respect to time to find the acceleration. For this example, this
is trivial
4.
Draw a free body diagram. The only force acting on the particle is
gravity the free body diagram is shown in the figure. The force vector follows as .
5.
Write down Newton’s laws of motion. This is easy
The
vector equation actually represents three separate differential equations of
motion
6.
Eliminate reactions this is not needed in this example.
7.
Identify initial conditions. The initial conditions were given in this
problem we have that
8. Solve
the equations of motion. In
general we will use MAPLE or matlab to do the rather tedious algebra necessary
to solve the equations of motion. Here,
however, we will integrate the equations by hand, just to show that there is no
magic in MAPLE.
The equations of motion are
It
is a bit easier to see how to solve these if we define
The equation of motion can
be re-written in terms of as
We can separate variables
and integrate, using the initial conditions as limits of integration
Now we can re-write the
velocity components in terms of (x,y,z)
as
Again, we can separate
variables and integrate
so the position and
velocity vectors are
Applications
of trajectory problems: It is traditional in elementary physics and dynamics courses to solve
vast numbers of problems involving particle trajectories. These invariably involve being given some
information about the trajectory, which you must then use to work out something
else. These problems are all somewhat
tedious, but we will show a couple of examples to uphold the fine traditions of
a 19th century education.
 Estimate how far you could throw a stone from
the top of the Kremlin palace.
Estimate how far you could throw a stone from
the top of the Kremlin palace.
Note that
1.
The horizontal
and vertical components of velocity at time t=0
follow as
2.
The components of
the position of the particle at time t=0
are
3.
The trajectory of
the particle follows as
4.
When the particle
hits the ground, its position vector is . This must be on the trajectory, so
where
is the time of impact.
5.
The two
components of this vector equation gives us two equations for the two unknowns ,
which can be solved
clear all
syms v0 theta tI g D H real
eq1
= v0*cos(theta)*tI==D;
eq2 = H+v0*sin(theta)*tI - g*tI^2/2;
[D,tI] = solve([eq1,eq2],[D,tI]);
D = simplify(D)
For a rough estimate of the
distance we can use the following numbers
1.
Height of Kremlin
palace 71m
2. Throwing velocity maybe 25mph?
(pretty pathetic, I know - you can probably do better, especially if you
are on the baseball/softball teams).
3.
Throwing angle 45 degrees.
Substituting numbers gives
36m (118ft).
If you want to go wild, you
can maximize D with respect to ,
but this won’t improve your estimate much.
 Silicon nanoparticles with radius 20nm are in thermal motion near a flat
surface. At the surface, they have an
average velocity ,
where m is their mass, T is the
temperature and k=1.3806503 × 10-23 is
the Boltzmann constant. Estimate the maximum height above the surface that a
typical particle can reach during its thermal motion, assuming that the only
force acting on the particles is gravity
Silicon nanoparticles with radius 20nm are in thermal motion near a flat
surface. At the surface, they have an
average velocity ,
where m is their mass, T is the
temperature and k=1.3806503 × 10-23 is
the Boltzmann constant. Estimate the maximum height above the surface that a
typical particle can reach during its thermal motion, assuming that the only
force acting on the particles is gravity
1.
The particle will
reach its maximum height if it happens to be traveling vertically, and does not
collide with any other particles.
2.
At time t=0 such a particle has position and velocity
3.
For time t>0 the position vector of the
particle follows as
Its
velocity is
4. When the particle reaches its maximum height, its
velocity must be equal to zero (if you don’t see this by visualizing the motion
of the particle, you can use the mathematical statement that if is a maximum, then ).
Therefore, at the instant of maximum height
5.
This shows
that the instant of max height occurs at time
6.
Substituting
this time back into the position vector shows that the position vector at max
height is
7. Si has a density of about 2330 kg/m^3. At room
temperature (293K) we find that the distance is surprisingly large: 10mm or
so. Gravity is a very weak force at the nano-scale
surface forces acting between the particles,
and the particles and the surface, are much larger.
Example 2: Free vibration of a suspension system.
A
vehicle suspension can be idealized as a mass m supported by a spring. The
spring has stiffness k and
un-stretched length . To test the suspension, the vehicle is
constrained to move vertically, as shown in the figure. It is set in motion by
stretching the spring to a length and then releasing it (from rest). Find an expression for the motion of the
vehicle after it is released.
As
an aside, it is worth noting that a particle idealization is usually too crude
to model a vehicle a rigid body approximation is much
better. In this case, however, we assume
that the vehicle does not rotate. Under these conditions the equations of
motion for a rigid body reduce to and ,
and we shall find that we can analyze the system as if it were a particle.
1. Introduce
variables to describe the motion: The length of the spring is a
convenient way to describe motion.
2.
Write
down the position vector in terms of these variables: We can take the origin at O as shown in the
figure. The position vector of the
center of mass of the block is then
3.
Differentiate
the position vector with respect to time to find the acceleration. For
this example, this is trivial
 4. Draw a free body diagram.
The free body diagram is shown in the figure: the mass is subjected to
the following forces
4. Draw a free body diagram.
The free body diagram is shown in the figure: the mass is subjected to
the following forces
·
Gravity, acting at the center of mass of the vehicle
·
The force due to the spring
·
Reaction forces at each of the rollers that force the vehicle to move
vertically.
Recall the spring force law, which says that the
forces exerted by a spring act parallel to its length, tend to shorten the
spring, and are proportional to the difference between the length of the spring
and its un-stretched length.
5.
Write down Newton’s laws of motion. This is easy
The i and j components give
two scalar equations of motion
6.
Eliminate reactions this is not needed in this example.
7.
Identify initial conditions. The initial conditions were given in this
problem at time t=0,
we know that and
8. Solve the
equations of motion. Again, we will first integrate the equations of
motion by hand, and then repeat the calculation with Matlab. The equation of motion is
We
can re-write this in terms of
This gives
We can separate variables
and integrate
Don’t worry if the last
line looks mysterious writing the solution in this form just makes
the algebra a bit simpler. We can now
integrate the velocity to find x
The integral on the left
can be evaluated using the substitution
so that
Here’s the Matlab solution
clear all
syms g k m L L0 real
assume(k>0);
assume(m>0);
syms x(t) v(t)
eq
= diff(x(t),t,2) == -(g+k*(x(t)-L0)/m);
v(t) = diff(x(t),t);
IC = [x(0)==L, v(0)==0];
x(t) = simplify(dsolve([eq,IC]))
It doesn’t quite look the
same as the hand calculation but of course so they really are the same.
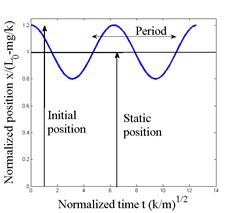 The solution is plotted in the figure. The behavior of vibrating systems will be
discussed in more detail later in this course, but it is worth noting some
features of the solution:
The solution is plotted in the figure. The behavior of vibrating systems will be
discussed in more detail later in this course, but it is worth noting some
features of the solution:
1. The average position of the mass is . Here, mg/k
is the static deflection of the
spring i.e. the deflection of the spring due to the weight of the vehicle
(without motion). This means that the car vibrates symmetrically about its
static deflection.
2.
The amplitude of vibration is . This corresponds to the distance of the mass
above its average position at time t=0.
3.
The period of oscillation (the time taken
for one complete cycle of vibration) is
4.
The frequency of oscillation (the number of
cycles per second) is (note f=1/T). Frequency is also sometimes quoted as angular frequency, which is related to f by . Angular frequency is in radians per second.
An
interesting feature of these results is that the static deflection is related
to the frequency of oscillation - so if you measure the static deflection ,
you can calculate the (angular) vibration frequency as
Example 3: Silly FE exam
problem
 This example shows how polar
coordinates can be used to analyze motion.
This example shows how polar
coordinates can be used to analyze motion.
The rod shown in the picture rotates at constant
angular speed in the horizontal plane.
The interface between block and rod has friction coefficient . The rod pushes a block of mass m, which starts at r=0 with radial speed V. Find an expression for r(t).
1. Introduce variables to describe the motion the polar coordinates work for this problem
2. Write down the position vector and differentiate to
find acceleration we don’t need to do this we can just write down the standard result for
polar coordinates
3. Draw a free body diagram shown in the figure note that it is important to draw the friction
force in the correct direction. The
block will slide radially outwards, and friction opposes the slip.
4. Write down Newton’s law
5. Eliminate reactions
The component of F=ma shows that
The friction law gives . Substituting this into the component of F=ma and simplifying
shows that
6. Identify initial conditions Here, r=0 dr/dt=V at time t=0.
7. Solve the equation: If you’ve taken AM33 you will know how to
solve this equation… If not you can use
Matlab:
clear all
syms mu omega V0 real
syms r(t) v(t)
diffeq
= diff(r(t),t,2) + 2*mu*omega*diff(r(t),t) - r(t)*omega^2 ==0;
v(t) = diff(r(t),t);
IC = [r(0)==0,v(0)==V0];
r(t) = simplify(dsolve(diffeq,IC))
This can be simplified slightly by hand:
3.3.3 Numerical solutions to equations of motion using
MATLAB
In the preceding section, we were able to solve all
our equations of motion exactly, and hence to find formulas that describe the motion of the system. This should give you a warm and fuzzy feeling
it appears that with very little work, you can
predict everything about the motion of the system. You may even have visions of running a
consulting business from your yacht in the Caribbean,
with nothing more than your chef, your masseur (or masseuse) and a laptop with
a copy of MAPLE.
Unfortunately
real life is not so simple. Equations
of motion for most engineering systems cannot be solved exactly. Even very simple problems, such as calculating
the effects of air resistance on the trajectory of a particle, cannot be solved
exactly.
For
nearly all practical problems, the equations of motion need to be solved numerically, by using a computer to
calculate values for the position, velocity and acceleration of the system as
functions of time. Vast numbers of computer programs have been written for this
purpose some focus on very specialized applications,
such as calculating orbits for spacecraft (STK); calculating motion of atoms in
a material (LAMMPS); solving fluid flow problems (e.g. fluent, CFDRC); or
analyzing deformation in solids (e.g. ABAQUS, ANSYS, NASTRAN, DYNA); others are
more general purpose equation solving programs.
In
this course we will use a general purpose program called MATLAB, which is
widely used in all engineering applications.
You should complete the MATLAB tutorial before proceeding any further.
In
the remainder of this section, we provide a number of examples that illustrate
how MATLAB can be used to solve dynamics problems. Each example illustrates one or more
important technique for setting up or solving equations of motion.
Example 1: Trajectory of a particle near
the earth’s surface (with air resistance)
 As a simple example we set
up MATLAB to solve the particle trajectory problem discussed in the preceding
section. We will extend the calculation
to account for the effects of air resistance, however. We will assume that our projectile is
spherical, with diameter D, and we
will assume that there is no wind. You
may find it helpful to review the discussion of aerodynamic drag forces in
Section 2.1.7 before proceeding with this example.
As a simple example we set
up MATLAB to solve the particle trajectory problem discussed in the preceding
section. We will extend the calculation
to account for the effects of air resistance, however. We will assume that our projectile is
spherical, with diameter D, and we
will assume that there is no wind. You
may find it helpful to review the discussion of aerodynamic drag forces in
Section 2.1.7 before proceeding with this example.
1. Introduce
variables to describe the motion: We can simply use the Cartesian
coordinates of the particle
2. Write down the position vector in
terms of these variables:
3. Differentiate the position vector
with respect to time to find the acceleration. Simple calculus gives
4.
Draw a free body diagram. The particle is now subjected to two forces,
as shown in the picture.
Gravity
as always we have .
Air resistance.
The
magnitude of the air drag force is given
by ,
where
·
is the air density,
·
is the drag coefficient,
·
D is the
projectile’s diameter, and
·
is the magnitude of the projectile’s velocity
relative to the air. Since we assumed the air is stationary, V is simply the magnitude of the
particle’s velocity, i.e.
The Direction
of the air drag force is always opposite to the direction of motion of the
projectile through the air. In this case
the air is stationary, so the drag force is simply opposite to the direction of
the particle’s velocity. Note that is a unit vector parallel to the particle’s
velocity. The drag force vector is
therefore
The
total force vector is therefore
5.
Write down Newton’s laws of motion.
It is helpful to simplify
the equation by defining a specific drag
coefficient ,
so that
The
vector equation actually represents three separate differential equations of
motion
6.
Eliminate reactions this is not needed in this example.
7.
Identify initial conditions. The initial conditions were given in this
problem - we have that
8. Solve
the equations of motion. We
can’t use the magic ‘dsolve’ command in MAPLE to solve this equation it has no known exact solution. So instead, we use MATLAB to generate a
numerical solution.
This takes two steps. First, we must turn the equations of motion
into a form that MATLAB can use. This
means we must convert the equations into first-order vector valued differential
equation of the general form . Then, we must write a MATLAB script to
integrate the equations of motion.
Converting the equations of motion: We can’t
solve directly for (x,y,z), because
these variables get differentiated more than once with respect to time. To fix this, we introduce the time derivatives of (x,y,z) as new unknown variables. In other words, we will solve for ,
where
These definitions are three new equations of motion
relating our unknown variables. In
addition, we can re-write our original equations of motion as
So,
expressed as a vector valued differential equation, our equations of motion are
MATLAB script. The procedure for solving these equations is
discussed in the MATLAB tutorial. A
basic MATLAB script is listed below.
function trajectory_3d
%
Function to plot trajectory of a projectile
%
launched from position X0 with velocity V0
%
with specific air drag coefficient c
%
stop_time specifies the end of the calculation
g =
9.81; %
gravitational accel
c=0.5;
% The constant
c
X0=0;
Y0=0; Z0=0; %
The initial position
VX0=10;
VY0=10; VZ0=20;
stop_time
= 5;
initial_w
= [X0,Y0,Z0,VX0,VY0,VZ0]; % The solution at t=0
[times,sols]
= ode45(@(t,w) eom(t,w,c,g),[0,stop_time],initial_w);
plot3(sols(:,1),sols(:,2),sols(:,3))
% Plot the
trajectory
end
function dwdt = eom(t,w,c,g)
%
Variables stored as follows w = [x,y,z,vx,vy,vz]
% i.e. x = w(1), y=w(2), z=w(3), etc
x = w(1); y=w(2); z=w(3);
vx = w(4); vy = w(5); vz = w(6);
vmag = sqrt(vx^2+vy^2+vz^2);
dxdt = vx; dydt = vy; dzdt = vz;
dvxdt = -c*vmag*vx;
dvydt = -c*vmag*vy;
dvzdt = -c*vmag*vz-g;
dwdt = [dxdt;dydt;dzdt;dvxdt;dvydt;dvzdt];
end
This
produces a plot that looks like this (the plot’s been edited to add the
grid,etc)
 Example 2:
Simple satellite orbit calculation
Example 2:
Simple satellite orbit calculation
The figure shows satellite with mass m orbiting a planet with mass M. At time t=0
the satellite has position vector and velocity vector . The planet’s motion may be neglected (this is
accurate as long as M>>m). Calculate
and plot the orbit of the satellite.
1.
Introduce variables to describe the
motion: We will use the (x,y)
coordinates of the satellite.
2. Write down the position vector in
terms of these variables:
3. Differentiate the position vector
with respect to time to find the acceleration.
4.
Draw a free body diagram. The satellite is subjected to a gravitational
force.
The
magnitude of the force is ,
where
·
is the gravitational constant, and
·
is the distance between the planet and the
satellite
The
direction of the force is always towards the origin: is
therefore a unit vector parallel to the direction of the force. The total force acting on the satellite is
therefore
5.
Write down Newton’s laws of motion.
The
vector equation represents two separate differential equations of motion
6.
Eliminate reactions this is not needed in this example.
7.
Identify initial conditions. The initial conditions were given in this
problem - we have that
8. Solve
the equations of motion. We follow
the usual procedure: (i) convert the equations into MATLAB form; and (ii) code
a MATLAB script to solve them.
Converting the equations of motion: We introduce
the time derivatives of (x,y) as new
unknown variables. In other words, we
will solve for ,
where
These definitions are new equations of motion
relating our unknown variables. In
addition, we can re-write our original equations of motion as
So,
expressed as a vector valued differential equation, our equations of motion are
Matlab script: Here’s a simple script to
solve these equations.
function satellite_orbit
%
Function to plot orbit of a satellite
%
launched from position (R,0) with velocity (0,V)
GM=1;
R=1;
V=1;
Time=100;
w0 =
[R,0,0,V]; %
Initial conditions
[t_values,w_values] = ode45(@(t,w) odefunc(t,w,GM),[0,time],w0);
plot(w_values(:,1),w_values(:,2))
end
function dwdt =
odefunc(t,w,GM)
x=w(1);
y=w(2); vx=w(3); vy=w(4);
r = sqrt(x^2+y^2);
dwdt = [vx;vy;-GM*x/r^3;-GM*y/r^3];
end
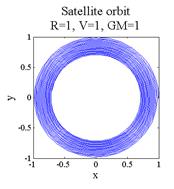 Running the script produces
the result shown (the plot was annotated by hand)
Running the script produces
the result shown (the plot was annotated by hand)
Do we believe this result? It is a bit surprising the satellite seems to be spiraling in towards
the planet. Most satellites don’t do
this so the result is a bit suspicious. The First Law of Scientific Computing states
that ` if a computer simulation predicts
a result that surprises you, it is probably wrong.’
So
how can we test our computation? There
are two good tests:
1. Look for any features in the
simulation that you can predict without computation, and compare your
predictions with those of the computer.
2. Try to find a special choice
of system parameters for which you can derive an exact solution to your
problem, and compare your result with the computer
We
can use both these checks here.
1.
Conserved quantities For this particular problem, we
know that (i) the total energy of the system should be constant; and (ii) the
angular momentum of the system about the planet should be constant (these
conservation laws will be discussed in the next chapter for now, just take this as given). The total energy of the system consists of
the potential energy and kinetic energy of the satellite, and can be calculated
from the formula
The total angular momentum
of the satellite (about the origin) can be calculated from the formula
(If you don’t know these formulas, don’t
panic we will discuss energy and angular momentum in
the next part of the course)
We
can have MATLAB plot E/m and ,
and see if these are really conserved. The energy and momentum can be calculated by
adding these lines to the MATLAB script
for i =1:length(t)
r = sqrt(w_values(i,1)^2 + w_values(i,2)^2)
vmag = sqrt(w_values(i,1)^2 +
w_values(i,2)^2)
energy(i)
= -GM/r + vmag^2/2;
angularm(i)
= w_values(i,1)*w_values(i,4)-w_values(i,2)*w_values(i,3);
end
You can then plot the
results (e.g. plot(t_values,energy)).
The results are shown below.
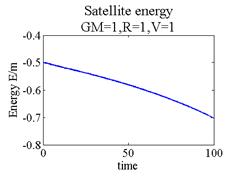
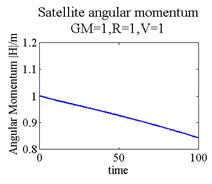
These
results look really bad neither energy, nor angular momentum, are
conserved in the simulation. Something
is clearly very badly wrong.
 Comparison to exact solution: It is not always possible to
find a convenient exact solution, but in this case, we might guess that some
special initial conditions could set the satellite moving on a circular path. A circular path might be simple enough to
analyze by hand. So let’s assume that
the path is circular, and try to find the necessary initial conditions. If you
still remember the circular motion formulas, you could use them to do
this. But only morons use formulas here we will derive the solution from scratch.
Note that, for a circular path
Comparison to exact solution: It is not always possible to
find a convenient exact solution, but in this case, we might guess that some
special initial conditions could set the satellite moving on a circular path. A circular path might be simple enough to
analyze by hand. So let’s assume that
the path is circular, and try to find the necessary initial conditions. If you
still remember the circular motion formulas, you could use them to do
this. But only morons use formulas here we will derive the solution from scratch.
Note that, for a circular path
(a) the particle’s radius r=constant. In fact, we know r=R, from the position at time t=0.
(b) The satellite must move
at constant speed, and the angle must increase linearly with time, i.e. where is a constant (see section 3.1.3 to review
motion at constant speed around a circle).
With this information we can solve the equations of
motion. Recall that the position,
velocity and acceleration vectors for a particle traveling at constant speed
around a circle are
We
know that from the initial conditions, and is constant. This tells us that
Finally, we can substitute
this into Newton’s
law
Both components of the
equation of motion are satisfied if we choose
So, if we choose initial
values of satisfying this equation, the orbit will be
circular. In fact, our original choice, should have given a circular orbit. It did not.
Again, this means our computer generated solution is totally wrong.
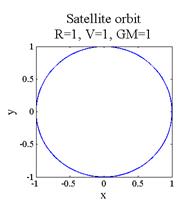 Fixing the
problem: In general, when computer predictions are
suspect, we need to check the following
Fixing the
problem: In general, when computer predictions are
suspect, we need to check the following
1. Is there an error in our MATLAB program? This is nearly always the cause of the
problem. In this case, however, the
program is correct (it’s too simple
to get wrong, even for me).
2. There may be something wrong with our equations of
motion (because we made a mistake in the derivation). This would not explain the discrepancy
between the circular orbit we predict and the simulation, since we used the
same equations in both cases.
3. Is the MATLAB solution sufficiently accurate? Remember that by default the ODE solver tries
to give a solution that has 0.1% error.
This may not be good enough. So
we can try solving the problem again, but with better accuracy. We can do this by modifying the MATLAB call
to the equation solver as follows
options = odeset('RelTol',0.00001);
[t_values,w_vlues] = ode45(@(t,w) odefunc(t,w,GM),[0,time],w0,options);
- Is there some feature of the
equation of motion that makes them especially difficult to solve? In this
case we might have to try a different equation solver, or try a different way
to set up the problem.
The figure on the right shows the orbit
predicted with the better accuracy. You
can see there is no longer any problem the orbit is perfectly circular. The figures below plot the energy and
angular momentum predicted by the computer.
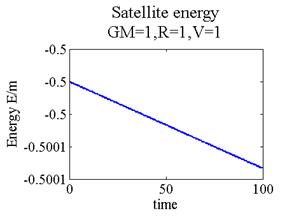
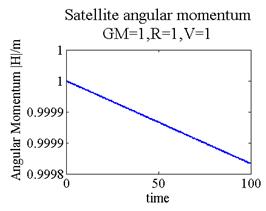
There is a
small change in energy and angular momentum but the rate of change has been
reduced dramatically. We can make the
error smaller still by using improving the tolerances further, if this is
needed. But the changes in energy and angular
momentum are only of order 0.01% over a large number of orbits: this would be
sufficiently accurate for most practical applications.
Most ODE
solvers are purposely designed to lose a small amount of energy as the
simulation proceeds, because this helps to make them more stable. But in some applications this is unacceptable
for example in a molecular dynamic simulation
where we are trying to predict the entropic response of a polymer, or a free
vibration problem where we need to run the simulation for an extended period of
time. There are special ODE solvers that
will conserve energy exactly.
Example 3: Earthquake response of a 2-storey
building
 The figure shows a very
simple idealization of a 2-storey building.
The roof and second floor are idealized as blocks with mass m.
They are supported by structural columns, which can be idealized as
springs with stiffness k and
unstretched length L. At time t=0
the floors are at rest and the columns have lengths (can you show this?). We will neglect the thickness of the floors
themselves, to keep things simple.
The figure shows a very
simple idealization of a 2-storey building.
The roof and second floor are idealized as blocks with mass m.
They are supported by structural columns, which can be idealized as
springs with stiffness k and
unstretched length L. At time t=0
the floors are at rest and the columns have lengths (can you show this?). We will neglect the thickness of the floors
themselves, to keep things simple.
For
time t>0, an earthquake makes the
ground vibrate vertically. The ground motion can be described using the
equation . Horizontal motion may be neglected. Our goal
is to calculate the motion of the first and second floor of the building.
It is worth noting a few
points about this problem:
1. You may be skeptical that the floor of a building can
be idealized as a particle (then again, maybe you couldn’t care less…). If so, you are right it certainly is not a `small’ object. However, because the floors move vertically
without rotation, the rigid body equations of motion simply reduce to and M=0,
where the moments are taken about the center of mass of the block. The floors behave as though they are
particles, even though they are very large.
2. Real earthquakes involve predominantly horizontal, not vertical motion of the
ground. In addition, structural columns
resist extensional loading much more strongly than transverse loading. So we should really be analyzing horizontal
motion of the building rather than vertical motion. However, the free body diagrams for
horizontal motion are messy (see if you can draw them) and the equations of
motion for vertical and horizontal motion turn out to be the same, so we
consider vertical motion to keep things simple.
3. This problem could be solved analytically (e.g. using
the `dsolve’ feature of MAPLE) a numerical solution is not necessary. Try this for yourself.
1. Introduce
variables to describe the motion: We will use the height of each floor as the variables.
2. Write down the position vector in
terms of these variables: We now have to worry about two masses, and
must write down the position vector of both
Note that we must measure
the position of each mass from a fixed
point.
3. Differentiate the position vector
with respect to time to find the acceleration.
4.
Draw a free body diagram. We
must draw a free body diagram for each mass. The resultant force acting on the
bottom and top masses, respectively, are
We
will have to find the spring lengths in terms of our coordinates to solve the problem. Geometry shows that
5.
Write down Newton’s laws of motion. F=ma
for each mass gives
This is two equations of
motion we can substitute for and rearrange them as
6.
Eliminate reactions this is not needed in this example.
7.
Identify initial conditions. We
know that, at time t=0
8. Solve
the equations of motion. We need to (i) reduce the equations to the
standard MATLAB form and (ii) write a MATLAB script to solve them.
Converting the equations. We now need
to do two things: (a) remove the second derivatives with respect to time, by
introducing new variables; and (b) rearrange the equations into the form . We remove the derivatives by introducing as additional unknown variables, in the usual
way. Our equations of motion can then
be expressed as
We can now code MATLAB to
solve these equations directly for dy/dt. A script (which plots the position of each
floor as a function of time) is shown below.
function building
%
k=100;
m=1;
omega=9;
d=0.1;
L=10;
time=20;
g = 9.81;
w0 = [L-m*g/k,2*L-3*m*g/(2*k),0,0];
[t_values,w_values] = ode45(@(t,w) eom(k,m,L,d,omega,g),[0,time],w0);
plot(t_values,w_values(:,1:2));
end
function dwdt = eom(t,w,k,m,L,d,omega,g)
y1=w(1);
y2=w(2);
v1=w(3);
v2=w(4);
dwdt = [v1;v2;...
-2*k*(y1-d*sin(omega*t)-L)/m+2*k*(y2-y1-L)/m;...
-g-2*k*(y2-y1-L)/m];
end
The figures below plot the height of each floor as a
function of time, for various earthquake frequencies. For special earthquake frequencies (near the
two resonant frequencies of the structure) the building vibrations are very
severe. As long as the structure is
designed so that its resonant frequencies are well away from the frequency of a
typical earthquake, it will be safe.
We
will discuss vibrations in much more detail later in this course.
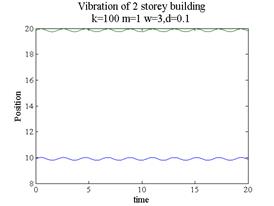
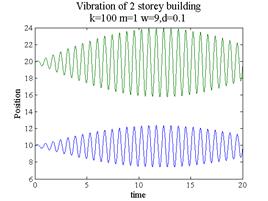
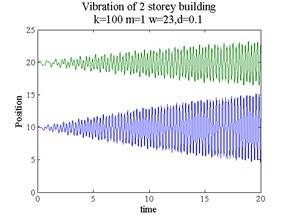
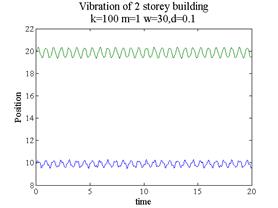
Final
remark: we made this calculation a bit more complicated than necessary by
solving for the heights . It
is better to solve for the deflections
of the floors instead of their heights.
Define
If
we substitute for in our equations we find that
These are a lot simpler, and more importantly, tell us
that the motion of the system does not depend on the spring length L or gravity.
3.4 Summary of main equations and
definitions
Position-velocity-acceleration relations
in a Cartesian Frame
The direction of the velocity vector is tangent to its
path.
The magnitude of the velocity vector is the distance traveled along the path
per unit time (speed).
A unit vector tangent to the path can be found as
Straight line motion with constant acceleration
Here,
a is the (constant) acceleration; are the position and speed at time t=0.
Straight line motion with time/position dependent
acceleration
Acceleration
given as a function of time:
Acceleration
given as a function of position
Separation
of variables for one-dimensional motion
Simple Harmonic Motion 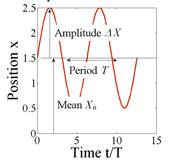
Circular Motion at Constant Speed
General Circular Motion
Note
that the straight-line motion relations can be used to relate ,
by exchanging
Motion along
an arbitrary path in normal-tangential coordinates
Position-velocity-acceleration relations in
polar-coordinates
Newton’s laws
For
a particle
For
a rigid body moving without rotation or rotating at fixed angular rate about a
fixed axis (you must
take moments about the center of mass)
Drawing free body diagrams:
1. Decide which part of a system you will idealize as a
particle (you may need more than one particle)
2. Draw the part of the system you have idealized as a
particle by itself (very important!). It is important to make sure that your
particle is isolated it can’t be touching something else. You may
need more than one drawing if you have more than one particle in your system.
3. Draw on any of the following external forces that
apply. Make sure you draw them acting in the correct direction, acting on the
correct part of the body:
a.
gravity (at the
COM);
b.
air resistance or
lift forces (and sometimes moments) various conventions are used to locate these
forces but in this course we usually put them at the COM and neglect moments;
c.
Buoyancy forces
(act at the COM of the displaced fluid)
d.
Electrostatic or
electromagnetic forces
4. Draw the forces exerted by springs attached to the
particle. It is best to assume that
springs always pull on the point they are connected to, and that the magnitude
of the force in the spring is ,
where l is the length of the spring,
and is its unstretched length.
5. Draw the forces exerted by dashpots or dampers (like
springs, assume they pull on the object they are connected to, and exert a
force magnitude where l is
the length of the dashpot.
6. Draw forces exerted by cables. Cables always pull, and exert a force
parallel to the direction of the cable.
The magnitude of the force has to be left as an unknown.
7.
Draw any unknown
reaction forces, with the following rules:
a.
Reaction forces
must act at any point on any point of the body that is touching something
outside the particle (i.e. a part of your system that you did not include in
your drawing in step 2).
b.
If the connection
between the two touching objects prevents them from rotating with respect to
one another (or, like a motor, makes them rotate with some controllable angular
speed), you will need to draw both reaction forces and moments. (Reaction moments do sometimes come up in
dynamics problems, but they are not very common, so think carefully before
including them).
c.
If friction acts at the contact point, and you
don’t know whether the two objects slide at the contact (or you know they do
not slide), draw both a normal and a tangential force with unknown magnitudes N,T (or some suitable variable). The direction of the friction force is not
important. DO NOT assume .
d.
If friction acts
at the contact point, and you know the contact slips, draw both a tangential and a normal
force. You must draw the tangential
force so that it opposes the direction of sliding (ask a faculty member or TA
if you don’t understand this). If slip
occurs you can assume .
e.
If the contact
point is frictionless, draw only a normal force.
f.
If your particle
is being touched by a two-force member (no, this is not a gender and sexuality
class… a two force member is a massless rod, connected through freely rotating
hinges at both ends. A massless freely
rotating wheel can also be idealized as a two-force member) you can assume the
reaction force acts parallel to the two-force member.
g.
If you have more
than one particle in your system, make sure that any forces exerted by one
particle on the other have equal and opposite reactions.
Calculating unknown forces or
accelerations using Newton’s laws:
1. Decide how to idealize the system (what are the
particles?)
2. Draw a free body diagram showing the forces acting on
each particle
3. Consider the kinematics
of the problem. The goal is to calculate the acceleration of each particle in
the system you may be able to start by writing down the
position vector and differentiating it, or you may be able to relate the
accelerations of two particles (eg if two particles move together, their
accelerations must be equal).
4. Write down F=ma
for each particle.
5. If you are solving a problem involving a massless
frames (see, e.g. Example 3, involving a bicycle with negligible mass) you also
need to write down about the particle.
6. Solve the resulting equations for any unknown
components of force or acceleration (this is just like a statics problem,
except the right hand side is not zero).
Problems
like this will usually ask you to make some design prediction at the end, which
might involve calculating critical conditions for something to slip, tip,
break, etc.
·
At the onset of
slip at a contact
·
At the critical
point where an object tips over, a reaction force somewhere will go to
zero. You will have to identify where
this point is, find the reaction force, and set it to zero.
Deriving equations of motion for a
system of particles
1. Introduce a set of variables
that can describe the motion of the system.
Don’t worry if this sounds vague it will be clear what this means when we solve
specific examples.
2. Write down the position
vector of each particle in the system in terms of these variables
3. Differentiate the position
vector(s), to calculate the velocity and acceleration of each particle in terms
of your variables;
4. Draw a free body diagram
showing the forces acting on each particle.
You may need to introduce variables to describe reaction forces. Write down the resultant force vector.
5. Write down Newton’s law for each particle. This will generate up to 3 equations of
motion (one for each vector component) for each particle.
6. If you wish, you can
eliminate any unknown reaction forces from Newton’s laws. If you are trying to solve the
equations by hand, you should always do this; of you are using MATLAB, it’s not
usually necessary you can have MATLAB calculate the reactions
for you. The result will be a set of differential equations for the variables
defined in step (1)
7. If you find you have fewer
equations than unknown variables, you should look for any constraints that restrict the motion of the particles. The constraints must be expressed in terms of
the unknown accelerations.
8. Identify the initial conditions for the variables
defined in (1). These are usually the
values of the unknown variables, their time derivatives, at time t=0. If you happen to know the values of
the variables at some other instant in time, you can use that too. If you don’t know their values at all, you
should just introduce new (unknown) variables to denote the initial conditions.
9. Solve the differential
equations, subject to the initial conditions.
Trajectory equations for particle moving
near earth’s surface with no air resistance
Solving differential equations with
Matlab:
Example: to solve
with
initial conditions at time t=0
clear all
syms
x(t) t omega_n
zeta x0 v0
diffeq
= (1/omega_n^2)*diff(x(t),t,2) + 2*zeta/omega_n * diff(x(t),t) + x(t)==0
Dx = diff(x)
initial_condition = [x(0)==x0, Dx(0)==v0]
x(t) = simplify(dsolve(diffeq,initial_condition))
Re-writing a second-order differential equation as a
pair of first-order equations for MATLAB
Example: to solve
we
introduce as an additional variable. This new equation, together with the
original ODE can then be written in the following form
This
is now in the form
as
required.